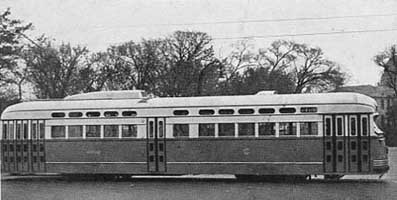


A sinistra, una PCC delle Chicago Surface Lines; al centro una versione europea di PCC in servizio a Den Haag,
decisamente più convincente come estetica; a destra una All Electric ATAC, certamente la più bella fra le tre.
tram e trasporto pubblico a Roma
Tecnica dei rotabili tramviari
Le motrici All Electric dell'ATAC
Storia e tecnologia della motrice PCC
Il tram in America alla fine degli anni Venti
Tecnologia della motrice PCC
L'avviatore
I freni
Il carrello
Le motrici All Electric dell'ATAC
A sinistra, una PCC delle Chicago Surface Lines; al centro una
versione europea di PCC in servizio a Den Haag,
decisamente più convincente come
estetica; a destra una All Electric ATAC, certamente la più bella fra le tre.
Il tram in America alla fine degli anni Venti
Retrocediamo nel tempo riportandoci, in America, alla fine degli anni Venti, quando il tipico tram urbano americano era una grossa vettura a carrelli a quattro motori, semplificata al massimo, nella maggior parte dei casi con un comando diretto con controller della serie K o simile senza riduzione di eccitazione e col solo freno pneumatico diretto; completa assenza di frenatura reostatica (i controller K erano sprovvisti delle relative posizioni) o di pattini elettromagnetici, impianto pneumatico privo di valvola tripla e di freno automatico per la completa rinuncia a qualsiasi traino di rimorchio; abbastanza diffuso però, vista la generale tendenza all'agente unico, era il dispositivo di controllo presenza del conducente (detto comunemente, con orribile terminologia "uomo morto"). Con queste motrici il tram poteva contare su una velocità massima certamente non superiore ai 30-35 km/h e una accelerazione di poco superiore ad 1 m/s2, valori con i quali difficilmente poteva competere con l'auto privata già all'epoca in pieno sviluppo ed anche con gli autobus che, per quanto potessero allora apparire primitivi, erano già abbastanza diffusi in sostituzione soprattutto delle numerose linee di interurbans che già erano cadute sotto la scure della soppressione perché non redditizie. E appunto perché anche il tram rischiava a breve scadenza di fare le fine degli interurbans, le compagnie che gestivano le grandi reti tramviarie urbane nelle città americane, ed erano ancora qualche decina, cominciarono ad agitarsi chiedendo aiuto all'industria per la modernizzazione del tram.
L'utente del trasporto pubblico chiedeva al tram le seguenti qualità: velocità, marcia senza strappi, silenziosità, mentre le aziende di trasporto, dal canto loro, chiedevano una elevata capacità di trasporto senza dover ricorrere all'uso di rimorchiate.
Le prime misure prese per soddisfare gli utenti e rendere il tram competitivo con i mezzi gommati furono però soltanto dei palliativi, quali il riavvolgimento dei motori per spremerne qualche cavallo in più e l'introduzione della riduzione di eccitazione per quei motori che erano in grado di sopportarla, misure che in un certo senso peggiorarono la situazione anziché migliorarla: in molti casi le vecchie vetture, con l'aumentata coppia disponibile, andavano incontro a interminabili pattinamenti delle ruote, in ciò aiutate dalle cattive abitudini di molti conducenti che si ostinavano a guidarle secondo i criteri con i quali avevano per anni portato il tram: si marca il primo punto di marcia per avviare la vettura e poi, più o meno di un fiato, si passa a fine parallelo.
Era, quest'ultimo, il metodo di guida detto dal sottoscritto "alla napoletana", in quanto sistematicamente usato a Napoli nella condotta delle vetture a carrelli, ma sporadicamente utilizzato anche a Roma nella condotta delle MATER. Ma non eravamo i soli a scoprire certe possibilità del tram; ecco un altro caso. A Vienna, nel 1948, entrarono in servizio delle vetture provenienti da New York (i Third Avenue cars) a comando diretto con pedale di uomo morto e i conducenti viennesi avevano ben presto scoperto che si poteva avviare più rapidamente la vettura lasciando, da fermo, il pedale dell' u.m. e spostando il controller sulla prima posizione di parallelo; poi azionando il pedale, il tram partiva in parallelo ad alta accelerazione.
Come palliativo di un palliativo si pensò allora di introdurre in trazione tramviaria urbana il comando ad accelerazione automatica, già largamente impiegato da anni sugli interurbans, giustamente pensando che questo comando avrebbe posto fine alle cattive abitudini di condotta e sia la General Electric che la Westinghouse proposero degli equipaggiamenti a comando indiretto, semplificando quanto già in uso nei servizi extraurbani, quindi utilizzando dei sistemi elettropneumatici, visto che secondo l'idea del momento il freno reostatico era da bandire e quindi l'aria compressa sul tram ci sarebbe sempre stata.
La G.E. propose l'avviatore PC (Pneumatic Controller), sistema che poi approderà in Europa e, oltre ad essere utilizzato nella forma di origine (motrici STFER Castelli gr. 90), darà luogo a tutta la serie di avviatori PCM per trazione tramviaria e filoviaria. L'avviatore PC era caratterizzato da un controller ad albero a eccentrici comandato da un servomotore pneumatico e stabiliva l'accelerazione del rotabile in avviamento, in definitiva la velocità di avanzamento di detto albero, valutando la corrente assorbita dai motori e facendo sì, mediante un relè limite di corrente opportunamente tarato, che quest'ultima variasse entro limiti prestabiliti, col risultato di avere una accelerazione estremamente variabile col carico, la pendenza della via ecc., da un valore di circa 1,5 m/s2 per vettura vuota che al momento si riteneva non potersi superare per l'aderenza disponibile, a meno di 1 m/s2 per un aumento del 50% nel carico, situazione che avrebbe impedito l'avviamento del tram su pendenze maggiori del 10%, tutt'altro che rare nelle reti urbane; ciò rese necessario porre a disposizione del conducente un dispositivo per ridurre, all'occorrenza, la sensibilità del relè limite.
La Westinghouse presentò il suo sistema VA (Variable Accelerator), progenitore dei vari avviatori Marelli VA, VAI, VAIF, ecc. usatissimi in Italia in trazione filoviaria, che in luogo dell'avviatore rotante impiegava una serie di contattori a comando pneumatico, nella quale ogni contattore provocava l'eccitazione del successivo solo se la corrente di trazione era scesa al di sotto di un limite prestabilito, anche qui a mezzo di un relè tarato (sistema talvolta detto a progressione di blocco). Il VA prevedeva dall'inizio la possibilità, per il conducente, di stabilire in anticipo il valore di accelerazione con diversi gradini presenti sul controller di manovra, ad esempio con tre posizioni di parallelo ad accelerazione crescente o con degli interruttori. Si potrebbe osservare che si trattò solo di un miglioramento formale rispetto all'avviatore PC, la levetta di desensibilizzazione del relè limite essendo uscita dalla porta per rientrare dalla finestra come posizioni del controller.
Ma nemmeno con i comandi automatici la situazione sembrò migliorare molto, perché, se da un lato si sottraeva, almeno in parte, la vettura al temperamento del conducente, l'automatismo introduceva due nuovi motivi di protesta da parte dell'utenza, che usando i termini americani chiameremo il jerk e lo shut-off.
Il jerk è il contraccolpo che il passeggero sente negli istanti di esclusione di parti del reostato: una cosa piacevolissima per gli amanti del tram che possono così contare i passi dell'avviatore (meglio se accompagnata da rumori di contattori e simili), ma fastidiosa per i normali utenti, dovuta alla brusca variazione dell'accelerazione. Ma gli avviatori automatici allora disponibili, sia il PC che il VA, essendo basati su dispositivi meccanici di derivazione più o meno diretta dai precedenti controller a comando diretto, proprio per la loro costruzione non potevano avere un gran numero di posizioni; se si arrivava a cinque in serie e altrettante in parallelo era già molto e la variazione di corrente tra un passo e il successivo era sempre tale da provocare un notevole jerk. C'è anche da osservare che se con un controller a comando diretto un conducente gentile poteva graduare l'avviamento in modo da ridurre il jerk, l'avviatore automatico se ne fregava della gentilezza e seguitava a funzionare secondo la taratura ricevuta.
Lo shut-off è invece, in un certo modo, il jerk all'apertura del circuito di trazione, un contraccolpo in senso inverso di quello che il passeggero riceve in accelerazione. Anche qui, con un controller manuale di tipo antiquato senza interruttore di linea, nella corsa di ritorno del controller verso lo zero, il reostato era sempre reinserito anche se rapidamente, ciò che dava una certa gradualità all'operazione: ma se il circuito di trazione comprendeva un interruttore di linea che apriva il circuito al minimo spostamento a ritroso della manovella del controller, lo shut-off poteva essere notevole ed era ciò che normalmente si verificava anche nei comandi automatici.
Si arrivò così, nel 1929, alla oramai famosa conferenza dei gestori di reti tramviarie urbane, la President's Conference Committee, fine della quale era lo stabilire delle regole di progetto in base alla quali poter costruire un tram che, senza sacrificare le esigenze di comodità dei passeggeri, avesse prestazioni tali da poter competere con il trasporto su gomma pubblico e privato (*).
Il primo risultato della conferenza fu la scoperta che l'accelerazione in avviamento e in frenatura poteva benissimo superare i valori fino allora ammessi, a patto che fossero ridotti i relativi contraccolpi, ossia il jerk in avviamento e lo shut-off all'apertura del circuito di trazione. Come conseguenza, l'avviamento e la frenatura dovevano effettuarsi a mezzo di dispositivi ad elevato numero di gradini. Dalle prove che saranno successivamente effettuate dal comitato tra il 1930 e il 1934, risulterà che l'accelerazione poteva anche raggiungere un valore massimo di 2,1 m/s2 e che un valore conveniente per un servizio commerciale sarebbe stato di circa 1,8 m/s2, sempre però che il contraccolpo non avesse superato il valore di 0,9 m/s3.
Ricordiamo che la velocità è la variazione dello spazio s nel tempo t, ossia il rapporto s/t; l'accelerazione è la variazione della velocità rispetto al tempo, ossia il rapporto (s/t)/t=s/t2; il contraccolpo è la variazione dell'accelerazione rispetto al tempo, ossia il rapporto (s/t2)/t=s/t3. Da ciò le misure in m/s, m/s2, m/s3 delle tre grandezze; se alcuni valori sopra riportati appaiono strani, ciò è dovuto al fatto che sono stati convertiti dagli originali in misure inglesi.
All'atto pratico, se già si presentava problematico costruire un avviatore a gran numero di gradini, ancor più complessa diventava la faccenda se si voleva minimizzare il contraccolpo e non poteva certo mantenersi la frenatura di servizio ad aria compressa, praticamente non integrabile in un complessivo di regolazione che trattasse simultaneamente trazione e frenatura; il nuovo tram doveva quindi valersi della sola frenatura reostatica quale freno di servizio, salvo aggiungere altri dispositivi per colmare alcune lacune tipiche di questo sistema di freno. E' anche da notare che l'eliminazione del freno ad aria compressa permetteva di sopprimere interamente l'impianto pneumatico con notevole risparmio di peso e di ingombro.
Ancora per semplificare la costruzione dell'avviatore si decise poi di sopprimere la regolazione serie-parallelo: i motori della vettura sarebbero stati sempre collegati nello stesso modo, indipendentemente dalla velocità richiesta; all'atto pratico, i motori saranno sempre quattro, dovendosi avere la completa aderenza, e saranno collegati due a due in serie, le due coppie essendo collegate in parallelo.
E' interessante notare come i primi studi sulla futura vettura tramviaria abbiano dato luogo a due prototipi chiamati PCC-A e PCC-B; mentre il primo era una vettura più o meno usuale che finì poi sulla rete di Brooklin, il secondo sembra fosse stato realizzato utilizzando un autobus; la cosa avrebbe dell'incredibile, se non si trattasse dell'America. Comunque del bus-tram si perdono rapidamente le tracce, mentre il primo ordine per motrici PCC è posto nel 1935 dalla Brooklin and Queens Transit Corporation, che diverrà poi la New York Board of Transportation. Alla fine del 1948, nell'America del Nord saranno stati emessi ordini per 4709 vetture, suddivise secondo il seguente schema, nel quale sono indicati due diversi tipi di equipaggiamento elettrico, per i quali si rimanda al paragrafo seguente.
| costr. | quant. | equipagg. elettrico |
| St. Louis Car | 3701 | Westinghouse: 2910 vett., General Electric: 1799 vett. |
| Pullman | 1007 | |
| Clark Equip. | 1 | |
|
tot. |
4709 |
Il numero massimo di PCC in servizio avrebbe raggiunto le 4919 vetture alla fine del 1951.
La PCC con equipaggiamento Westinghouse furono importate in Europa e largamente utilizzate in Olanda (rete di Den Haag [L'Aia]) e in Belgio (reti di Antwerpen [Anversa]) e di Bruxelles); successivamente lo stesso equipaggiamento sarà utilizzato dall'industria cecoslovacca nella costruzione dei vari tipi di motrici Tatra, in servizio su tutte le maggiori reti del blocco orientale.
A questo punto l'attenzione dei costruttori si focalizzò sull'avviatore e sia la General Electric che la Westinghouse presentarono le loro soluzioni. L'avviatore Westinghouse era composto da un reostato toroidale R suddiviso in 99 sezioni, ogni sezione facendo capo ad una lamina di contatto B; l'equipaggio mobile, posto in rotazione da un servomotore elettrico, pressava le lamine, una alla volta, contro la corona C a mezzo dei rulli A, cortocircuitando quindi per ogni posizione gli elementi precedenti del reostato. La General Electric ricorse invece ad una disposizione nella quale gli elementi del reostato facevano capo a lamine di contatto montate su un cilindro, realizzando quindi qualcosa di simile ad un collettore di macchina a corrente continua, sul quale scorreva un giogo di spazzole mosso da un servomotore; tra l'altro, questa è anche la disposizione che negli anni a venire sarà utilizzata dal Tecnomasio Brown Boveri nell'avviatore ARG largamente utilizzato in trazione filoviaria. Entrambi i tipi di avviatore provvedevano sia alla trazione che alla frenatura reostatica.
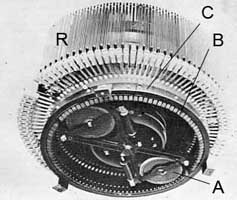
Un avviatore Westinghouse.
E' interessante vedere come la G.E. abbia soddisfatto, col proprio avviatore, le due condizioni di avviamento e frenatura ad accelerazione variabile minimizzando jerk e shut-off. Le 99 posizioni dell'avviatore servono sia alla trazione che alla frenatura; le posizioni da 1 a 79 si utilizzano in trazione, mentre in frenatura si utilizzano tutte; l'equipaggio mobile si muove dalla pos. 1 alla 79 in trazione e dalla 99 alla 1 in frenatura. Supponiamo che il conducente, dopo aver avviato la vettura, riporti a riposo il pedale di accelerazione (le PCC americane avevano i comandi a pedale; ved. oltre) prima che la sequenza di avviamento si sia conclusa e supponiamo anche l'acceleratore sia giunto alla posizione 20; l'equipaggio dell'avviatore resta in posizione 20, col che si hanno a disposizione 79-20=59 ulteriori posizioni di marcia e 20 posizioni di frenatura. Se il conducente aziona ora il pedale del freno, i circuiti si commutano immediatamente in frenatura reostatica con i 20 passi di reostato a disposizione, ma se l'avviatore si fosse fermato, per azione del conducente, in posizione 30 i passi di reostato disponibili sarebbero 30 e se si fosse fermato a 10, sarebbero stati 10. In altre parole, all'atto dell'inizio della frenatura il reostato si trova sempre nella posizione ottima per iniziare la frenatura a quella velocità, senza che sia necessario portarlo in una posizione speciale, ciò che riduce ogni ritardo e il contraccolpo. Se poi il conducente mantiene stabilmente a fondo il pedale acceleratore, il reostato si esclude completamente in posizione 79 e l'equipaggio seguita a ruotare, senza interessarlo, fino alla posizione 99 inserendo cinque gradini di riduzione di eccitazione sui motori.
Qui interverrebbe però una difficoltà al momento di azionamento del freno, se si lasciasse la vettura libera di correre, in coasting, come si farebbe con un normale tram, visto che in base al principio sopra accennato l'acceleratore dovrà inserire il valore di resistenza corrispondente alla velocità del momento, qualunque essa sia. E' quindi necessario informare l'acceleratore della velocità del rotabile, istante per istante, durante il coasting e, non volendo utilizzare un rilevatore tachimetrico, gli inventori del comitato hanno escogitato il seguente sistema: appena rilasciato il pedale acceleratore, il sistema avvia immediatamente una debole frenatura reostatica, limitando la corrente ad un certo valore, inizialmente stabilito in 40 A e valuta poi continuamente questa corrente nelle sue variazioni in base al rallentamento o all'accelerazione del rotabile in coasting (salite o discese), deducendo quindi dalla corrente la velocità del rotabile, e muove l'equipaggio dell'avviatore onde includere sempre il valore esatto di resistenza: all'atto dell'azionamento del pedale del freno, il reostato partirà sempre dalla posizione adatta. Ecco come si eliminano o almeno si minimizzano jerk e shut-off. Il funzionamento precedente ha dato luogo ad una delle solite favole: le PCC americane non possono andare in coasting, o accelerano o frenano; non è vero, perché l'azione frenante dei 40 A è minima, praticamente trascurabile, un po' come se avessero collegato alle ruote un generatore tachimetrico (e forse sarebbe stato più semplice).
L'avviatore è comandato con un sistema a comparazione. Riferendoci al pedale acceleratore, questo pone in trazione i circuiti e dà alimentazione al servomotore dell'avviatore; simultaneamente carica la molla del comparatore, un elettromagnete percorso dalla corrente di trazione, l'azione del quale tende a riportare il pedale verso la posizione di riposo aprendo il circuito di comando. In tal modo, per ogni valore dello sforzo esercitato sul pedale, si crea un equilibrio con l'azione magnetica del comparatore e di conseguenza con la resistenza inserita dal reostato e la corrente del circuito di trazione. Analoga disposizione si ha per il pedale del freno, per il quale il comparatore agisce in base alla corrente di frenatura.
La vettura PCC ha i comandi di accelerazione e frenatura a pedale, anziché col solito controller. Molto si è discusso sull'opportunità di sostituire la tradizionale manovella con i pedali e molte dotte elucubrazioni su tempi di risposta e questioni psico-fisiche sono state presentate lasciando tutte, ovviamente, il tempo che trovavano. In America il comando a pedali è stato introdotto essenzialmente in vista dell'adozione dell'agente unico, quando il conducente doveva fare anche da bigliettaio e avere le mani libere era essenziale; le PCC europee avranno anch'esse in gran parte il comando a pedali; ma c'è anche da dire che molti esercenti hanno poi lamentato che i conducenti trattavano le PCC come fossero autobus, il che non è la maniera migliore per condurre un tram.
Gli americani saranno stati certamente entusiasti dell'aspetto dei nuovi tram; a noi europei le PCC, dal punto di vista estetico, non diciamo che facevano schifo, ma poco ci mancava: una cassa di enormi dimensioni rispetto al tram che eravamo abituati a vedere, con un frontale rotondeggiante e parabrezza diviso in due che avrebbe poi sempre richiamato il frontale di un autobus ed una parte posteriore ricca di superfici curve e, in alcuni modelli, dotata di un piccolo finestrino anch'esso reminiscente del posteriore di un autobus; oltre a ciò le fiancate della vettura erano nella maggior parte dei casi dotate di un gran numero di finestrini di dimensioni minime, ognuno dei quali con una parte superiore fissa, le standee windows (ved. immagini in testa), che secondo l'idea americana avrebbero dovuto permettere di guardare fuori ai viaggiatori in piedi. Per fortuna, la PCC, una volta importata in Europa, acquistò un po' alla volta una fisionomia più consona al nostro carattere.
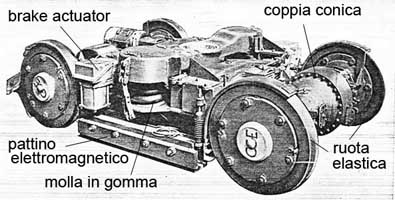
Per quanto riguarda i freni, abbiamo già accennato al freno reostatico di servizio il quale, come è ben noto, perde efficacia al di sotto di una certa velocità e deve necessariamente essere integrato da un freno meccanico. Nella vettura PCC quest'ultimo è un freno a tamburo agente sugli alberi dei motori ad azionamento elettromagnetico (Brake Actuator), che si inserisce automaticamente quando la corrente di frenatura scende al di sotto di una certa soglia (Lock Out). Si hanno infine i pattini elettromagnetici, due per carrello, come freni di emergenza.
La motrice PCC è "All Electric", ossia "tutto elettrico", in quanto non ha impianto pneumatico nè per la frenatura nè per i servizi ausiliari (avviatore, porte, ecc.); ma non tutte le motrici All Electric sono PCC, quest'ultimo termine indicando anche tutte le altre caratteristiche proprie di questa tecnologia. E' anche da notare che all'epoca dell'ideazione della PCC il tram senza impianto pneumatico era già di normale impiego in Europa: in quasi tutti paesi di lingua tedesca il freno di esercizio del tram, dalle origini e almeno fino alla seconda guerra mondiale, fu quello elettrico reostatico, all'inizio usandosi il freno a mano per l'arresto e solo dopo un certo tempo introducendo i freni a pattini elettromagnetici e frenando i rimorchi, se presenti, con il freno elettromagnetico solenoidale utilizzante la corrente reostatica della motrice, un antesignano dei Brake Actuators delle PCC. In America ci si accorse, ad un certo punto, che il comando puramente elettrico dei vari servizi ausiliari prima citati presentava alcune difficoltà; di conseguenza alcuni esercenti montarono sulle loro PCC un piccolo impianto pneumatico per l'azionamento di porte, sabbiere e simili; le PCC così modificate presero il nome di Air Electric.
Uno degli elementi caratteristici della vettura PCC è il carrello, che si è voluto semplificare al massimo facendo attenzione in particolare alla silenziosità di marcia, eliminando o almeno riducendo al massimo le parti metalliche che, nel reciproco accoppiamento, danno inevitabilmente luogo ad una marcia rumorosa. Nel seguito descriviamo il carrello adottato dalle vetture All Electric poste in servizio dall'ATAC nel 1958 che, pur essendo costruito dalla CGE su licenza della Transit Research Co., differisce dal carrello PCC originario americano in qualche particolare.
In un carrello di tipo tradizionale il fuso della sala ruota in un cuscinetto a strisciamento o a rulli, contenuto in una boccola libera di muoversi verticalmente guidata dal parasale (o piastra di guardia): già questo è un primo accoppiamento, talvolta dotato di gioco maggiore dell'indispensabile per consentire un certo orientamento della sala in curva, che costituisce una fonte di rumore. Il telaio del carrello appoggia sulla boccola tramite una molla, mentre attraverso un'altra molla, che può essere disposta in vario modo, la traversa oscillante che sostiene il carico poggia sul telaio: in questa disposizione altra causa di rumore sono gli arresti di fine corsa della traversa sia in senso longitudinale che in senso trasversale, che specie nelle curve strette danno luogo a veri propri urti. Quella descritta è la struttura base di un carrello, ma la costante opera di costruttori e inventori ha portato a soluzioni talvolta ben più complesse, con un gran numero di piani lavorati, bussole di accoppiamento, staffe, spine, pendini, tiranti, certo con miglioramento del comportamento dinamico del carrello, ma certo anche con notevole incremento di rumori e vibrazioni, oltre che di una manutenzione sempre più attenta.
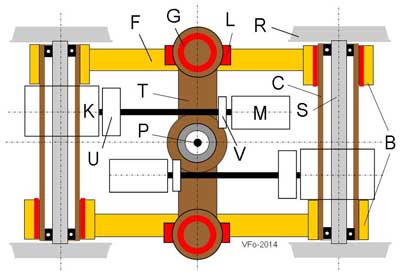
Il progetto del carrello PCC parte dal concetto di accorpare più funzioni in uno stesso elemento con fondamentali semplificazioni. Uno schema cinematico semplificato del carrello CGE è riportato nella figura sottostante; lo schema vale con le dovute variazioni per qualsiasi carrello PCC.
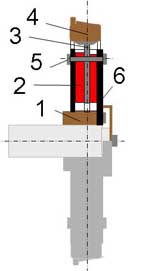
Ruota elastica e carrello PCC.
Elemento fondamentale del carrello è la ruota elastica, composta (fig. a sinistra) dal mozzo 1 calettato sulla sala, che sostiene il centro ruota 3 a mezzo degli spessori in gomma 2 serrati dalle piastre 6 a mezzo dei tiranti 5; sul centro ruota è calettato il cerchio 4. Il centro ruota è collegato elettricamente al mozzo da una treccia di rame.
Sul carrello (fig. a destra) la sala S portante la ruota elastica R è abbracciata dall'elemento tubolare C che mantiene in posizione i cuscinetti dell'albero e costituisce simultaneamente una traversa di estremità del telaio del carrello; porta anche la scatola K per gli ingranaggi della trasmissione del moto. Le fiancate del telaio F si collegano a queste due traverse mediante accoppiamenti cilindrici B, uno dei quali per parte è collegato con l'interposizione di una boccola in gomma, mentre l'altro è collegato rigidamente. Secondo gli autori dell'articolo citato, pare che sia stato confermato dall'esperienza che è sufficiente dotare solo due dei quattro collegamenti di un elemento elastico; in realtà, appare chiaro che collegare tramite boccole di gomma tutti i quattro attacchi delle fiancate alle traverse avrebbe reso un po' problematica la rigidità della struttura specie alle sollecitazioni di torsione.
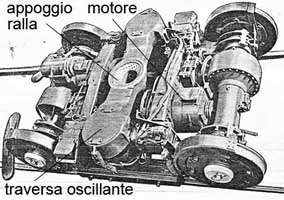
La traversa oscillante T poggia sulle fiancate del telaio attraverso una molla in gomma G che reagisce agli sforzi sia longitudinali che trasversali, mentre dei tamponi in gomma L sopportano le spinte longitudinali conseguenti all'avviamento e alla frenatura del rotabile. La ralla appoggia sulla traversa a mezzo di un cuscinetto conico di guida, ma il punto di appoggio P è stato abbassato al di sotto il piano della traversa (dettaglio non visibile in figura: P si trova al disotto del piano del disegno) per ridurre la sollecitazione a flessione delle molle in gomma.
I motori M, due per carrello, sono montati con l'asse longitudinale ed ognuno aziona una coppia di ruote attraverso un breve albero di trasmissione, un giunto elastico V e una coppia di ingranaggi conici contenuti nella scatola K. La dentatura ipoide di questi ingranaggi è forse ciò che contribuisce in maggior modo alla silenziosità di marcia della vettura PCC, tanto che gli americani chiamarono subito le nuove vetture "il tram che si avvicina sibilando", ma è anche un elemento di montaggio non semplice che richiede attenzione e pratica sperimentata. Sull'albero di trasmissione, in prossimità della scatola degli ingranaggi, è montato il freno a tamburo U ad azionamento elettromagnetico.
Il carrello B3 delle motrici ATAC.
Sulla coppia ipoide ci sarebbe da scrivere un libro. Una coppia conica con ingranaggi a denti dritti non pone problemi particolari a confronto di una analoga cilindrica; ma se la dentatura è elicoidale, di qualsiasi tipo, interviene la spinta assiale secondo l'asse del pignone a rendere le cose difficili, oltre il fatto che una coppia a denti elicoidali esige una lavorazione di estrema precisione. La spinta assiale dovuta all'inclinazione dei denti si scarica sui cuscinetti di supporto del pignone, che devono essere del tipo reggispinta e sono di solito realizzati a rulli conici. Ma il pignone deve mantenere, rispetto alla corona, una certa posizione con tolleranze di alcune unità di centesimi di millimetro e se in fase di montaggio il precarico sui cuscinetti è tale da poter soddisfare a questa esigenza, è difficile che lo stesso precarico sia mantenuto dopo centinaia o migliaia di ore di funzionamento con continue sollecitazioni nei due sensi, in accelerazione e in frenatura e a temperature variabili da vari gradi sotto zero fino a 40°C e più; si è più volte constatato che il normale sistema di dado assiale bloccato da chiavette o copiglie è del tutto insufficiente, visto che basta uno spostamento del dado di uno o due gradi per mandare fuori tolleranza la posizione del pignone e abbreviare drasticamente la vita dell'accoppiamento. L'adozione del pignone sostenuto ai due lati, come nel carrello originale della TRC, non apporta alcun beneficio dal punto di vista delle difficoltà accennate, anzi ne crea delle altre dovute alla difficoltà di smontaggio del cuscinetto interno; bene quindi ha fatto la CGE adottando il pignone a sbalzo, magari aumentando un po' le dimensioni dei cuscinetti per compensare la maggior sollecitazione a flessione risultante.
Le motrici All Electric dell'ATAC
Le motrici All Electric CGE che l'ATAC pose in servizio nel 1958 sono spesso individuate come PCC, il che a rigore non è esatto per i motivi che seguono.
Nel circuito di trazione non è impiegato l'avviatore multiposizioni Westinghouse o General Electric, ma si è utilizzato un avviatore PCM del tipo già ampiamente in uso in trazione tramviaria e filoviaria, sostituendone l'azionamento pneumatico con un servomotore elettrico; il circuito di trazione, pur con il necessario adattamento al diverso tipo di azionamento, è sostanzialmente quello degli avviatori PCM.
Mentre nella PCC americana la frenatura elettrica reostatica è del tipo convenzionale con autoeccitazione dei motori e utilizza lo stesso avviatore, nella vettura CGE l'avviatore è escluso in frenatura, che dispone per i motori di un circuito completamente a parte, nel quale gli indotti sono stabilmente chiusi su resistenze, mentre i relativi induttori sono alimentati dalle dinamo che normalmente provvedono alla carica delle batterie di accumulatori; in frenatura, le dinamo sono staccate dal circuito di carica batterie e alimentano i campi dei motori, mentre il comando del freno varia, a mezzo di un reostato collegato al controller di frenatura, l'eccitazione delle dinamo. Questa soluzione si rivelerà problematica in esercizio con le batterie staccate dalla ricarica durante la frenatura, che normalmente, alla fine della reostatica, richiede l'intervento proprio della batteria nell'alimentazione dei freni a tamburo ed eventualmente di quelli a pattini. La soluzione definitiva del problema arriverà negli anni Ottanta con l'installazione sul rotabile di un inverter alimentato dalla tensione di linea per la carica delle batterie, lasciando alle dinamo la sola funzione di eccitatrici dei motori in frenatura reostatica.
Rispetto al carrello PCC americano, la CGE ha introdotto, nel carrello delle motrici ATAC, tre modifiche importanti. L'elemento elastico tra traversa e telaio del carrello, realizzato con una molla in gomma, nel carrello americano è costituito da due molle a spirale in acciaio montate tra due sedi opportunamente sagomate; la parte in gomma si riduce ad un tampone in gomma che interviene solo a vettura carica oltre ad un certo limite, seguendo quindi il concetto di molla di graduazione utilizzato sui carrelli tramviari fin dalle prime costruzioni Brill. I tamburi dei freni meccanici, che nel carrello CGE sono montati dopo il giunto elastico che collega il motore all'albero di trasmissione ossia proprio all'ingresso nella scatola degli ingranaggi, nel carrello americano erano montati all'uscita dal motore, soluzione che si ritiene poco sicura per l'interposizione di un elemento che, con la sua rottura, vanificherebbe l'azione del freno. Infine il pignone della coppia ipoide è montato a sbalzo anziché tra due cuscinetti, come nella versione originaria.
Il controller di marcia è del tipo usuale a manovella, affiancato da un piccolo controller per i freni.
L'impiego di un controller a manovella in sostituzione del comando a pedali originario non è una caratteristica delle sole vetture ATAC, essendo stato adottato sulle PCC anche da altre aziende di trasporto europee (ad es. Budapest); solo le All Electric ATAC presentavano però un controller di frenatura in tutto e per tutto uguale ad un ordinario rubinetto autoregolatore per freno ad aria; forse una soluzione che riunisse i comandi di marcia e freno in un unico apparato sarebbe stata più consona al tipo di rotabile.

I PCC Tatra, rotabili che si sono rivelati affidabili e longevi; sulla rete
di Praga un T3,
modello di costruzione iniziata nel 1962, in servizio nel 2017.
Circuiti di trazione e frenatura
Sulle PCC di Bruxelles
_______________
(*) Ente che nel 1936 si sostituì alla President's Conference Committee, che tra l'altro nel 1931 aveva cambiato nome in Electric Railway President's Conference Committee (ERPCC).
| Home Page | presentazione | rete urbana |
rev. A1 21/05/21