tram e trasporto pubblico a Roma
Note di trazione elettrica
Il motore in serie a corrente continua
Inserzione del motore e corrente assorbita
Velocità del motore in funzione della corrente
Coppia motrice in funzione della corrente
Avviamento reostatico
Regolazione della velocità con transizione serie-parallelo
Regolazione della velocità con la riduzione di eccitazione dei motori
Avvertenza. - Quanto sotto esposto si riferisce esclusivamente ai sistemi di trazione elettrica tradizionale, ossia con il sistematico impiego dell'avviamento reostatico; non si tratta in alcun modo degli attuali azionamenti con chopper, inverter e simili e impiego di motori trifasi. Il campo specifico di applicazione dei sistemi illustrati è quello tramviario, metropolitano e ferroviario leggero, per quanto gli stessi si possano integralmente applicare anche alla trazione ferroviaria.
Motore con eccitazione in serie
Il motore tradizionalmente impiegato in trazione elettrica tramviaria con alimentazione in corrente continua, almeno fino agli anni Ottanta del XX secolo, è il motore con eccitazione in serie; faremo qui riferimento solo a questo tipo di motore ed ai metodi tradizionali di avviamento e regolazione di velocità delle vetture tramviarie.
Ogni motore elettrico è composto della parte rotante, detta rotore, indotto o armatura (useremo preferibilmente il secondo termine) e della parte fissa detta statore o induttore (anche qui useremo preferibilmente il secondo termine). Nel motore a corrente continua l'indotto è formato da un albero ruotante su cuscinetti a strisciamento o a sfere, portante un cilindro o tamburo in ferro laminato, sul quale è disposto un certo numero di bobine di filo isolato; gli estremi delle bobine fanno capo ad una serie di lamine di rame disposte sulle direttrici di un cilindro, isolate dall'asse, il collettore. Sul collettore, che ruota solidalmente all'albero e al tamburo, appoggiano una o più coppie di spazzole in carbone, che chiudono il circuito esterno sull'avvolgimento dell'indotto. L'induttore è sostituito da una struttura in ferro di fusione, portante un certo numero di poli sporgenti, generalmente quattro, che si affacciano al tamburo dell'indotto; lo spazio tra le superfici dei poli e del tamburo è detto interferro e conviene tenerlo il più ridotto possibile, compatibilmente con la libera rotazione dell'indotto; sui poli sono avvolte le bobine induttrici o di campo. Nel motore in serie le bobine di campo sono costituite da poche spire di grosso filo o bandella di rame e sono collegate in serie all'indotto attraverso alle spazzole.
Normalmente, tra i poli principali, l'induttore porta altrettanti poli ausiliari di minori dimensioni, avvolti in serie con le bobine di campo: servono per eliminare certi fenomeni transitori nella commutazione, ossia nel passaggio delle spazzole da una lamella alla successiva del collettore, fenomeni che darebbero luogo a scintillio sotto le spazzole. Al momento non ci occupiamo dei poli ausiliari.
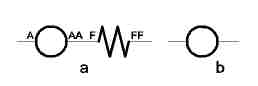
Rappresenteremo il motore in serie con il simbolo a) o, quando non interessi distinguere tra indotto e induttore, con il b); secondo l'uso invalso A, AA indicheranno sempre i terminali dell'indotto (spazzole) ed F, FF quelli dell'induttore.
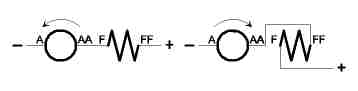
L'inversione di marcia del motore in serie si ottiene invertendo le connessioni dell'induttore rispetto all'indotto (o viceversa, metodo poco usato per ragioni elettriche) i simboli + e - indicano l'alimentazione esterna.
Inserzione del motore e corrente assorbita
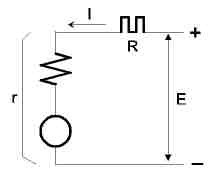
In trazione elettrica gli utilizzatori, cioè locomotori, elettromotrici, ecc., sono sempre collegati in parallelo fra loro e con la sorgente di alimentazione; solo all'inizio del secolo sono stati fatti dei tentativi di alimentazione in serie delle motrici, con risultati nulli (ad es. il sistema del Cattori). L'alimentazione è quindi a tensione costante: ciò significa che la tensione applicata alle motrici è sempre la stessa, ad es. 600 V, a meno della caduta di tensione in linea che riterremo al momento trascurabile. Lo schema sottostante rappresenta quindi un motore tramviario nelle sue condizioni di lavoro: E è la tensione di alimentazione, R una resistenza posta in serie al motore, r la resistenza interna del motore, I la corrente assorbita.
Nella rotazione dell'indotto nel campo magnetico fornito dall'induttore, si genera una tensione di segno contrario a quella di alimentazione (forza contro-elettromotrice o f.c.e.m.), che indicheremo con V; la tensione risultante nel circuito è quindi la differenza E-V e la corrente assorbita dal motore sarà I=(E-V)/(R+r).
Velocità del motore in funzione della corrente
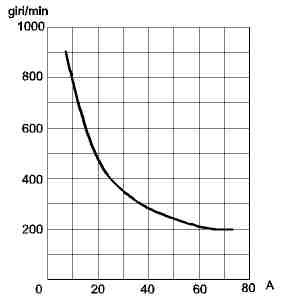
La f.c.e.m. dipende dalla velocità del motore (numero di giri al minuto): è nulla a motore fermo e tende ad eguagliare la tensione di alimentazione a velocità crescente, Dalla relazione precedente, ad es. per E=600 V, V=400 V, r=2,5 ohm, R=5 ohm; si avrebbe I=400/7,5=53 A . Dato che questo calcolo è del tutto teorico, giacchè E non è nota a priori, si preferisce, per un dato tipo di motore, misurare la corrente e la velocità per dati valori di E e di R+r e costruire un diagramma come quello che segue. Da questo è possibile ricavare la velocità (numero di giri al minuto) data la corrente assorbita o la corrente data la velocità.
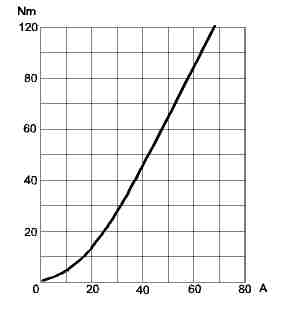
Coppia motrice in funzione della corrente
La coppia motrice del motore, che si traduce direttamente nello sforzo di trazione del rotabile, si misura in Nm (Newton x metro; misura che ha sostituito la precedente Kgm, Kg x metro) ed è anch'essa dipendente dalla corrente assorbita, come indicato nel diagramma sottostante.
Si è visto che la corrente assorbita dal motore è I=(E-V)/(R+r); se il motore è fermo e lo colleghiamo direttamente alla tensione di alimentazione senza la resistenza R (R=0 e V=0 dato con indotto fermo la f.c.e.m. è nulla) la corrente raggiunge il valore E/r, che, data la piccolezza di r, è sicuramente eccessivo sia dal punto di vista elettrico perchè si avrebbero danni agli avvolgimenti e al collettore, sia dal punto di vista meccanico perchè si avrebbe una coppia fortissima con danni meccanici. Per E=600 V ed r=2,5 ohm la corrente avrebbe il valore 600/2,5=290 A.
Per avviare il motore è quindi necessario inserirvi in serie una resistenza R che limiti la corrente al valore massimo ammesso e si ricava subito R=(E/Imax)-r; per E=600 V, se la corrente massima Imax è pari a 50 A e la resistenza interna del motore è 2,5 ohm, la resistenza necessaria è di 600/50-2,5=9,5 ohm.
R è detta resistenza di avviamento. Naturalmente, una volta avviatosi il motore, si sviluppa la f.c.e.m. E che si sottrae alla tensione di alimentazione, per cui la corrente progressivamente si riduce, arrivandosi ad una situazione di equilibrio alla quale corrisponde una certa velocità del motore ed una certa corrente assorbita. A questo punto, per aumentare ulteriormente la velocità, occorrerà ridurre di un tanto la resistenza R: si otterrà un aumento della velocità ed una ulteriore riduzione della corrente. Così seguitando, si arriverà ad un punto in cui la resistenza di avviamento è del tutto esclusa, R=0, ed il motore marcerà alla velocità massima assorbendo una certa corrente dipendente dalla coppia resistente, ossia dallo sforzo richiesto. All'atto pratico, la resistenza R deve quindi essere variabile in un certo numero di passi e costituisce il reostato di avviamento. L'ideale sarebbe avere una variazione continua di R, ma in pratica ciò è difficilmente realizzabile e ci si accontenta di una variazione a gradini; tanto maggiore è il numero di gradini, tanto più graduale è l'avviamento del rotabile.
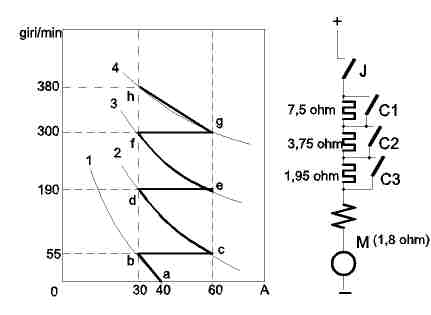
Un esempio di reostato di avviamento. Il diagramma seguente riporta il funzionamento di un reostato di avviamento a quattro posizioni. Le curve 1-4 sono state ricavate, come quella vista più sopra, per un motore per il quale supporremo una resistenza interna r=1,8 ohm funzionante alla tensione E=600 V; nel diagramma si è anche supposto che il motore, per le sue caratteristiche costruttive, ammetta una corrente massima Imax=60 A ed una minima Imin=30 A; durante l'avviamento la corrente dovrà quindi variare tra 30 e 60 A.
| pos. | corr. A |
J | C1 | C2 | C3 | f.c.e.m. V |
R tot. ohm |
R parz ohm |
giri/m |
| 1 | 40-30 | X | 0-150 | 13,2 | 7,5 | 0-55 | |||
| 2 | 60-30 | X | X | 150-375 | 5,7 | 2,75 | 55-190 | ||
| 3 | 60-30 | X | X | X | 375-488 | 1,95 | 1,95 | 190-300 | |
| 4 | 60-30 | X | X | X | X | 488 | - | - | 200-280 |
Alla prima tacca del reostato, chiusura del circuito di trazione, la corrente raggiunge il valore di 40 A, punto a, alla velocità zero. Essendo nulla in questo momento la f.c.e.m., la resistenza totale inserita dovrà essere pari a 600/40=15 ohm; togliendo 1,8 ohm di resistenza interna del motore restano 13,2 ohm per la resistenza di avviamento (curva 1). Il motore si avvia e raggiunge 55 giri/min con la corrente di 30 A, punto b. E' semplice ricavare ora la f.c.e.m. V generata dal motore in questa condizione: se la corrente assorbita è 30 A e la resistenza totale è 15 ohm, dovremo avere (600-V)/15=30, ossia V=150 V.
Spostando il controller sulla seconda tacca, la corrente deve essere portata al valore massimo previsto di 60 A, punto c, mentre la f.c.e.m. è sempre di 150 V non essendo variata la velocità del motore; la resistenza totale da avere in circuito è allora (600-150)/60=450/60=7,5 ohm, ossia 5,7 ohm di reostato e 1,8 ohm di resistenza interna; il motore accelera fino a 190 giri/min, condizione nella quale si passa alla terza tacca del controller.
Seguitando con questo procedimento, per ogni tacca del controller è possibile determinare la resistenza da inserire in circuito e quindi dimensionare il reostato di avviamento, come è indicato a fianco del diagramma di cui sopra.
Regolazione della velocità con transizione serie-parallelo
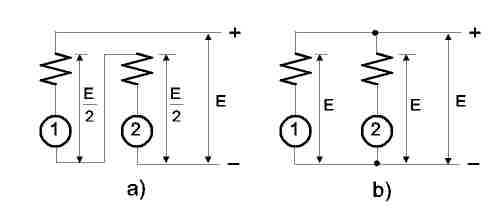
Nell'avviamento reostatico di cui sopra una sola velocità, quella corrispondente alla tacca 4, può ritenersi economica, non avendosi nessuna resistenza in serie al motore che dissipi energia. Nelle altre tacche una parte dell'energia prelevata dalla linea è dissipata nel reostato di avviamento; ad es., nella tacca 2, alla corrente a regime di 30 A la potenza dissipata sul reostato con 5,7 ohm inseriti è 5,7x302=5130 W=5,13 kW, contro una potenza totale assorbita di 600x30=18000 W=18 kW. Nel caso delle vetture tramviarie l'equipaggiamento elettrico comprende di solito due motori (o quattro motori collegati due a due in parallelo); in tal caso è possibile, con il solo avviamento reostatico, disporre di due velocità economiche, ricorrendo al collegamento dei motori dapprima in serie tra loro e poi in parallelo sulla linea. Nello schema sottostante, in a) i due motori sono collegati tra loro in serie e se la tensione di linea è E, ognuno di essi sarà sottoposto alla tensione E/2; in b) i due motori sono collegati in parallelo e la tensione di linea E è applicata ad entrambi; possiamo approssimativamente dire che in serie i due motori raggiungono una velocità massima pari alla metà della velocità raggiunta in parallelo (non è proprio così).
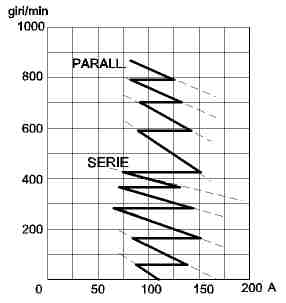
Con un equipaggiamento a due motori l'avviamento della vettura si esegue con i motori in serie ed un certo numero di tacche reostatiche, come prima indicato; all'ultima tacca in serie i due motori sono collegati in serie, direttamente sulla linea; successivamente si reinserisce il reostato di avviamento, collegando i motori in parallelo e si esclude progressivamente il reostato fino all'ultima tacca, in corrispondenza della quale ogni motore è direttamente alimentato dalla linea. Il diagramma di avviamento è composto di due parti per i due collegamenti dei motori; ved. diagramma sottostante.
Transizione con apertura del circuito. Un primo metodo per eseguire il collegamento in serie o in parallelo di due motori, ossia di realizzare quella che si chiama transizione serie-parallelo, è quello detto ad apertura di circuito: i due motori, dapprima collegati in serie, sono staccati da linea e riconnessi poi alla stessa in parallelo. Questo metodo, oramai caduto in disuso, ha l'inconveniente che il controller deve aprire il circuito di trazione per la transizione spesso proprio in un momento in cui la corrente assorbita dai motori è particolarmente elevata, ad es. in una transizione in salita; ne consegue che i contatti del controller, nonostante gli accorgimenti per evitare gli archi, sono sottoposti a notevole usura; oltre a ciò, durante la transizione si annulla la coppia motrice, ciò che provoca strappi nella marcia del rotabile.
Transizione per corto circuito di un motore. La maggior parte degli equipaggiamenti tramviari opera invece la transizione con il metodo detto per corto circuito di un motore, che non presenta gli inconvenienti accennati e che schematicamente si può rappresentare nelle sue fasi come segue.
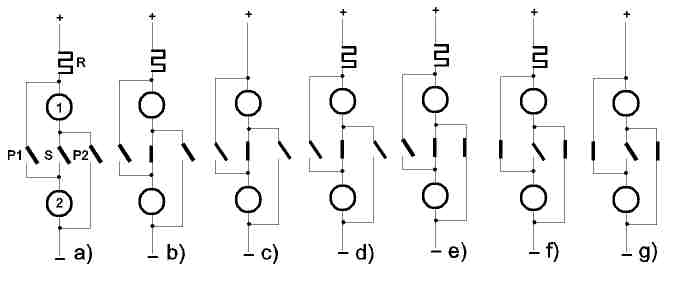
| rif. | condizione circuito | R | S | P1 | P2 |
| a | Circuito di trazione aperto, motori fermi. | incl. | |||
| b | Contatto S chiuso: marcia in serie, reostato inserito. | incl. | X | ||
| c | Contatto S chiuso, reostato escluso, marcia economica in serie. | escl. | X | ||
| d | Si reinserisce il reostato. | incl. | X | ||
| e | Contatto P2 chiuso, il motore 2 è cortocircuitato, quindi escluso dal circuito; il motore 1 è alimentato attraverso il reostato. |
incl. | X | X | |
| f | Contatto S aperto, contatti P1 e P2 chiusi: i motori sono alimentati separatamente dalla linea (parallelo). |
incl. | X | X | |
| g | Contatti P1, P2 chiusi, reostato escluso, marcia economica in parallelo. | escl. | X | X |
Transizione a ponte. E' il sistema di transizione serie-parallelo normalmente utilizzato in trazione metropolitana e ferroviaria leggera; si riassume nelle fasi indicate negli schemi sotto riportati.
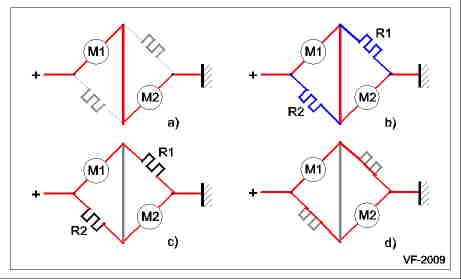
Un circuito per la transizione a ponte.
Regolazione della velocità con la riduzione di eccitazione dei motori
| Home Page | presentazione | tecnica della locomozione |
rev. A1 12/09/21